> Engineering
|
1. GPS Subsystem (GPS)
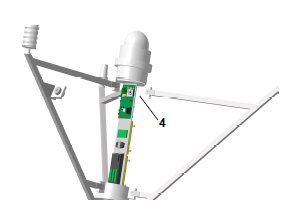
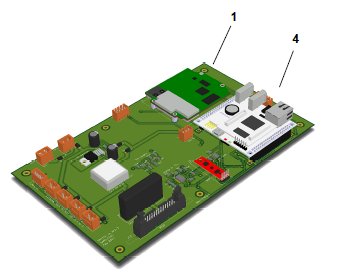
The GPS consists of a GPS antenna and a geodetic-quality GPS receiver. The GPS antenna (receives incoming, dual-frequency signals from several GPS satellites simultaneously, amplifies the GPS signals, and feeds them to the GPS receiver. The GPS receiver is the core sensor of the buoy platform. It receives, detects, and provides raw observables at the desired sampling rate. It also provides power to the GPS antenna. 2. Freeboard subsystem (FBS) The FBS consists of a sea level pressure sensor, an atmospheric pressure sensor, an inclinometer,a sonic ranging sensor, a conductivity sensor and the buoy mechanical structure. The main purpose of the FBS is to establish a connection between GPS height estimates and estimates of sea level and freeboard. The freeboard data can be found here. 3. Communication subsystem (CMS) The CMS relies on two-way data communications provided by the Iridium satellite network. The CMS consists of an Iridium antenna and an Iridium transceiver. The main purpose of the CMS is to make the GPS data and other data stored in the DMU available for download to a computer in the Internet. On SATICE buoy 3 and 4, a SBD modem and antenna has been added to the buoy. This gives us the opportunity to remote control the buoy such as cycle the power to the system or receive freeboard data even though the primary Iridium modem doesn't work or if the DMU doesn't respond. 4. Data management unit (DMU) The DMU consists of a low power singe board computer and a software component. The hardware component is a computer board. Its purpose is to provide an interface to control all subsystem sensors, download and preprocess the data, and communicate with the Ground Support System (GSS). The software component includes all software necessary to collect, reformat, and download data. 5. Power subsystem (PWS) The PWS consists of solar panels and a power storage unit (Gel and Alkaline batteries). The main purpose of the PWS is to provide power for continuous operations of the GPS, FBS, CMS, and DMU subsystems. The PWS is robust to power fluctuations, rebooting properly, and tolerating either short (hours) or long (season) power outages. The total battery capacity is 2400 Ah, which will be sufficient for the system to stay alive a couple of months without solar panels. 6. Mechanical subsystem (MCS) The MCS consists manily of a 5 meter long tube made of HDPE. The tube has three arms where a weather station, an iridium antenna, a camera and a snow depth sensor are mounted. The electronics are stored inside the tube, well protected from the Arctic environment. A small low power digital camera is attached to the mechanical structure. It is taking images of the structure and the iridium antenna with the sea ice in the background, see the images here. |

|
